Continual Learning of Range-Dependent Transmission Loss
Project Snapshot
- Project Title: Continual Learning of Range-Dependent Transmission Loss for Underwater Acoustics Using Conditional Convolutional Neural Networks
- Type: Research
- Project Report: View Article (PDF)
- Concepts:
- Range-Dependent Conditional Convolutional Neural Network (RC-CAN)
- Continual Learning and Catastrophic Forgetting
- Replay-Based Training Strategy
- Reduced Order Modeling (ROM)
- Duration: 2023-24
- Skills Developed:
- Data Generation: Bellhop
- Data Manipulation & Analysis: pandas, numpy, scipy
- Data Visualization: matplotlib, seaborn
- Feature Engineering: scikit-learn
- Model Deployment: PyTorch
- Model Evaluation: PyTorch
- Others: Compute Canada
Project Overview
1. Objective
To develop a data-driven model using a range-dependent conditional convolutional neural network (RC-CAN) for accurate prediction of underwater acoustic transmission loss over varying ocean bathymetry, incorporating a continual learning framework.
2. Key Contributions
- Novel RC-CAN Architecture: Introduced a convolutional neural network that conditions on range-dependent ocean bathymetry to predict acoustic transmission loss.
- Replay-Based Training Strategy: Implemented a continual learning approach to generalize the model across different bathymetry profiles, mitigating catastrophic forgetting.
- Application to Real-World Scenarios: Demonstrated the model's effectiveness on both idealized and real-world bathymetry data, including Dickin's seamount in the Northeast Pacific.
Introduction and Background
1. Challenges in Underwater Acoustic Prediction:
- Traditional numerical methods (e.g., Navier-Stokes equations) are computationally intensive and unsuitable for real-time far-field noise prediction.
- Existing deep learning models like Convolutional Recurrent Autoencoder Networks (CRAN) are limited by autoregressive prediction and lack far-field bathymetry information.
2. Proposed Solution:
- Develop an RC-CAN model that incorporates ocean bathymetry data directly into the neural network.
- Employ a continual learning framework to enable the model to adapt to varying bathymetry profiles without forgetting previously learned information.
Methodology
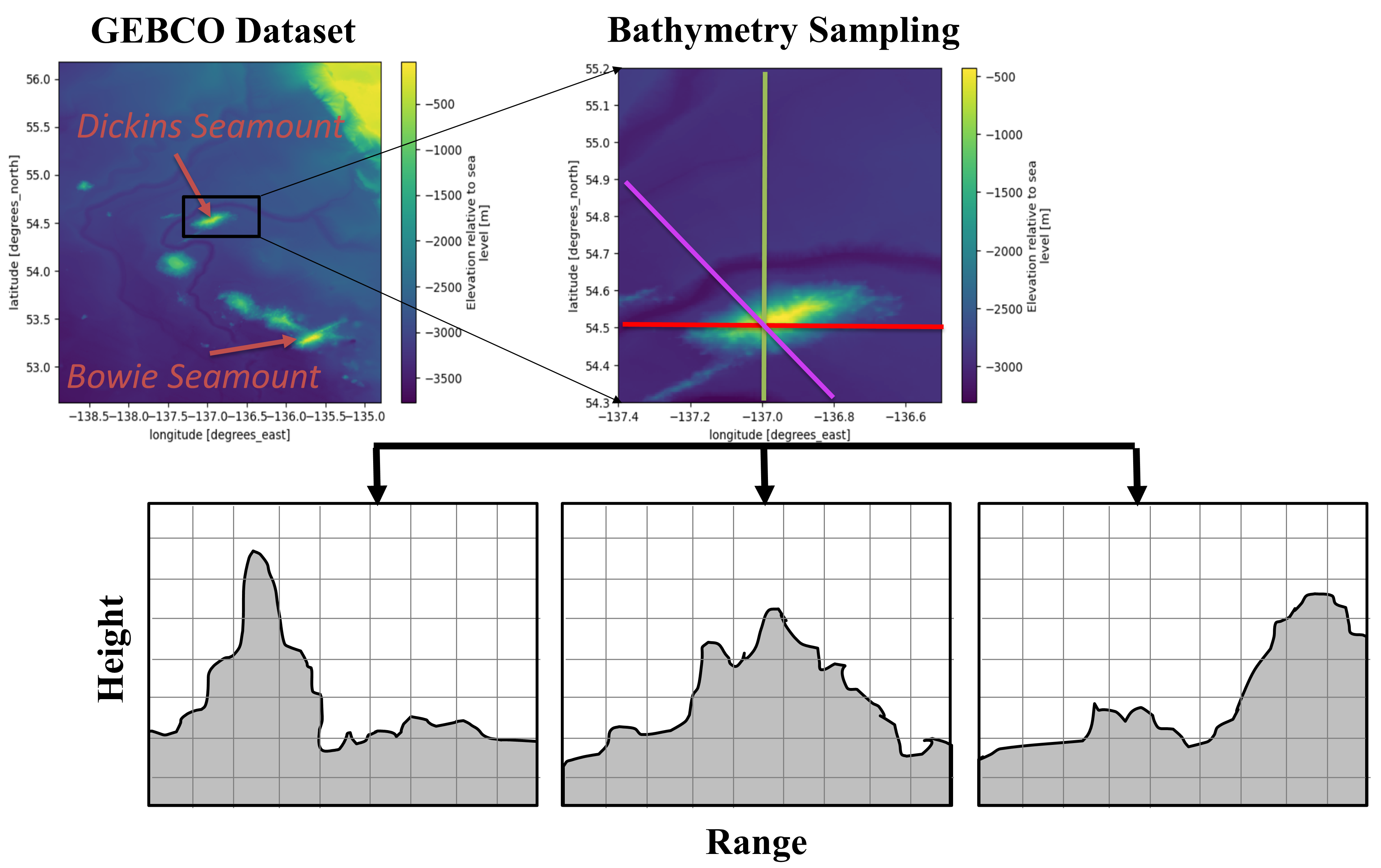
Figure 1: Schematics of sampling bathymetry profiles from GEBCO database.
1. Dataset Creation
-
Training Data Generation:
-
The RC-CAN model was trained using data generated by BELLHOP, a ray/beam tracing solver, to simulate transmission loss distributions across varying bathymetry conditions.
-
Sequential Training Process:
-
Step 1: Started with training on an ideal seamount dataset to establish a foundational understanding.
-
Step 2: Continued training with wedge profile datasets to introduce varying sea floor gradients.
-
Step 3: Concluded with training on the Dickins Seamount dataset to adapt the model to realistic bathymetry profiles.
-
Model Adaptation:
-
The sequential training enabled the RC-CAN model, initially trained on idealistic bathymetries, to accurately predict transmission loss for the complex and realistic Dickins Seamount profile.
-
Dickins Seamount Dataset:
-
Located in the Northeast Pacific Ocean, the Dickins Seamount provided a real-world bathymetry profile for model evaluation.
-
Ocean bathymetry data around the Dickins Seamount was sampled to create realistic datasets for validating the model's performance.
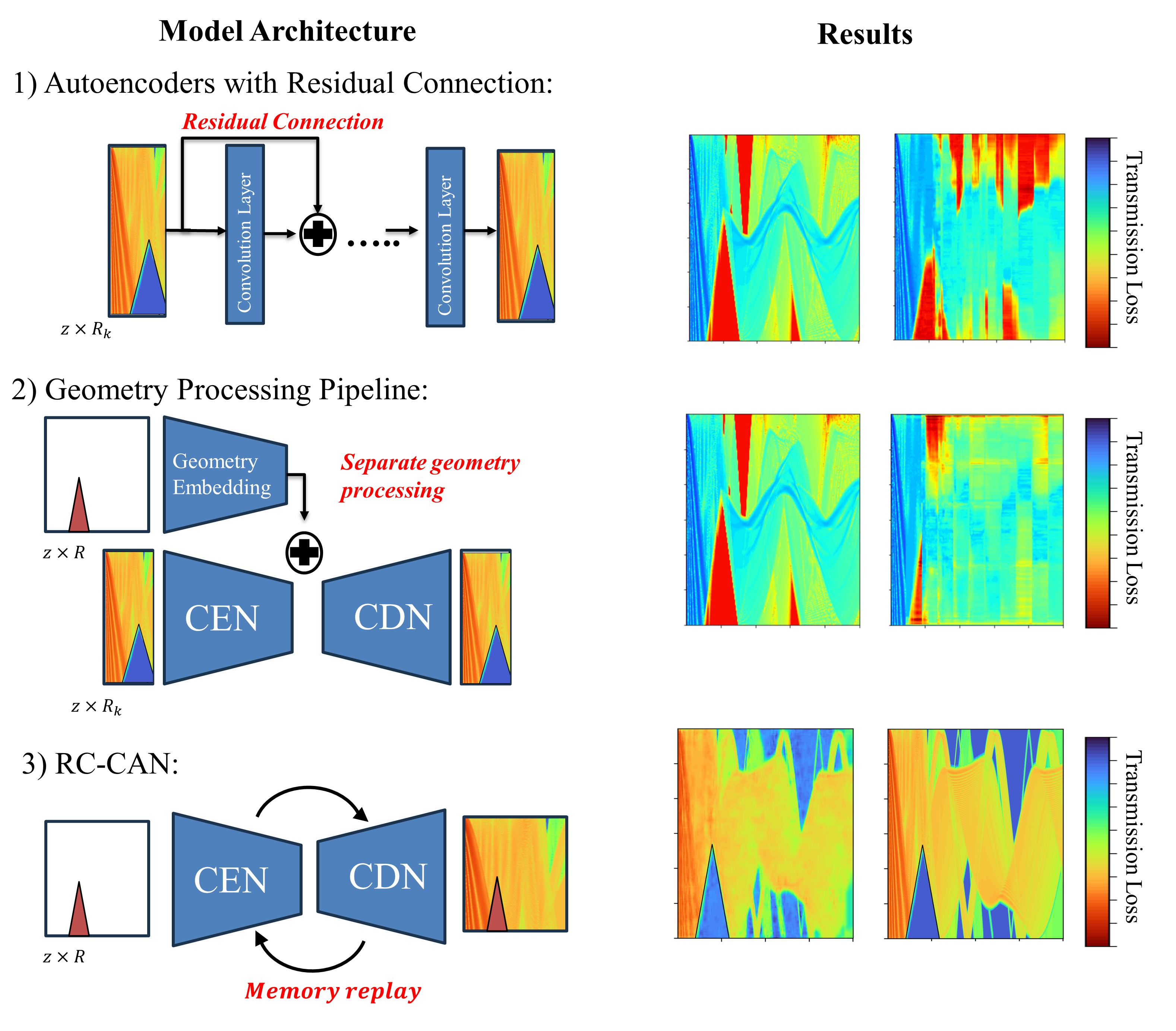
Figure 2: Comparison of three different ML architectures and results.
2. RC-CAN Architecture
Architecture Overview:
-
Network Structure: The RC-CAN model is a 2D convolutional network consisting of two main components:
- Encoder Path (\(\Psi_E\)): Encodes the input ocean bathymetry mesh into a low-dimensional latent space.
- Decoder Path (\(\Psi_D\)): Decodes the latent representation to predict the transmission loss on the input mesh.
-
Encoder Path Details:
- Comprises four padded convolutional layers.
- Each layer is followed by batch normalization and Leaky ReLU activation.
- A max pooling operation is applied after each convolution to downsample the data.
-
Decoder Path Details:
- Involves up-sampling the feature maps before each transpose convolution.
- Consists of four transpose convolutional layers (up-convolutions).
- Each layer is followed by batch normalization and Leaky ReLU activation.
- The final layer uses a 2D convolution kernel with one feature channel to align with the input data.
-
Total Convolutional Layers: The network comprises a total of 8 convolutional layers.
3. Replay-Based Training Strategy
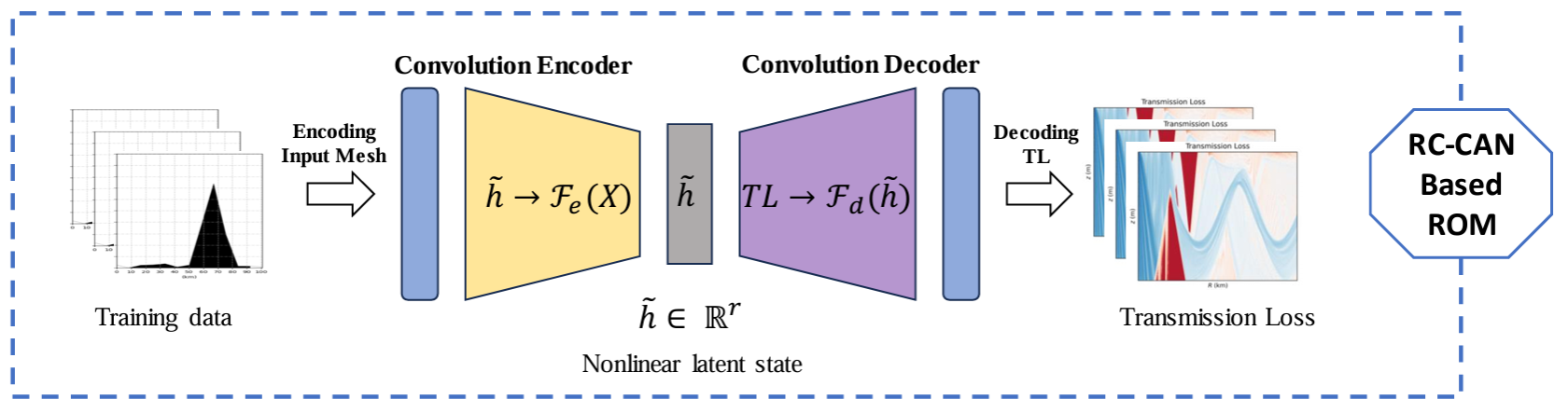
Figure 3: An illustration of the proposed range conditional convolutional network.
Figure 1: Schematics of sampling bathymetry profiles from GEBCO database.
1. Dataset Creation
-
Training Data Generation:
- The RC-CAN model was trained using data generated by BELLHOP, a ray/beam tracing solver, to simulate transmission loss distributions across varying bathymetry conditions.
-
Sequential Training Process:
- Step 1: Started with training on an ideal seamount dataset to establish a foundational understanding.
- Step 2: Continued training with wedge profile datasets to introduce varying sea floor gradients.
- Step 3: Concluded with training on the Dickins Seamount dataset to adapt the model to realistic bathymetry profiles.
-
Model Adaptation:
- The sequential training enabled the RC-CAN model, initially trained on idealistic bathymetries, to accurately predict transmission loss for the complex and realistic Dickins Seamount profile.
-
Dickins Seamount Dataset:
- Located in the Northeast Pacific Ocean, the Dickins Seamount provided a real-world bathymetry profile for model evaluation.
- Ocean bathymetry data around the Dickins Seamount was sampled to create realistic datasets for validating the model's performance.
Figure 2: Comparison of three different ML architectures and results.
2. RC-CAN Architecture
Architecture Overview:
-
Network Structure: The RC-CAN model is a 2D convolutional network consisting of two main components:
- Encoder Path (\(\Psi_E\)): Encodes the input ocean bathymetry mesh into a low-dimensional latent space.
- Decoder Path (\(\Psi_D\)): Decodes the latent representation to predict the transmission loss on the input mesh.
-
Encoder Path Details:
- Comprises four padded convolutional layers.
- Each layer is followed by batch normalization and Leaky ReLU activation.
- A max pooling operation is applied after each convolution to downsample the data.
-
Decoder Path Details:
- Involves up-sampling the feature maps before each transpose convolution.
- Consists of four transpose convolutional layers (up-convolutions).
- Each layer is followed by batch normalization and Leaky ReLU activation.
- The final layer uses a 2D convolution kernel with one feature channel to align with the input data.
- Total Convolutional Layers: The network comprises a total of 8 convolutional layers.
Figure 3: An illustration of the proposed range conditional convolutional network.
Continual Learning Approach:
- Challenge: Models tend to forget previously learned information when trained sequentially on new data (catastrophic forgetting).
- Solution: Implement a replay-based training method that stores a subset of past data and retrains the model periodically.
- Benefits: Enables the model to adapt to new bathymetry profiles while retaining knowledge from earlier training.
Training Procedure:
- Optimizer: AdamW optimizer for efficient gradient descent.
- Learning Rate Scheduler: Cosine annealing warm restarts to adjust the learning rate periodically.
- Loss Function: Minimize the reconstruction error using the L2 norm.
- Evaluation Metric: Structural Similarity Index Measure (SSIM) to compare predicted and ground truth data.
Results and Analysis
Model Performance:
- Accuracy: Achieved up to 90% SSIM accuracy in predicting transmission loss over Dickin's seamount.
- Generalization: Successfully predicted transmission loss for bathymetry profiles not seen during training.
- Single-Shot Prediction: Eliminated the need for autoregressive methods, improving efficiency and accuracy.
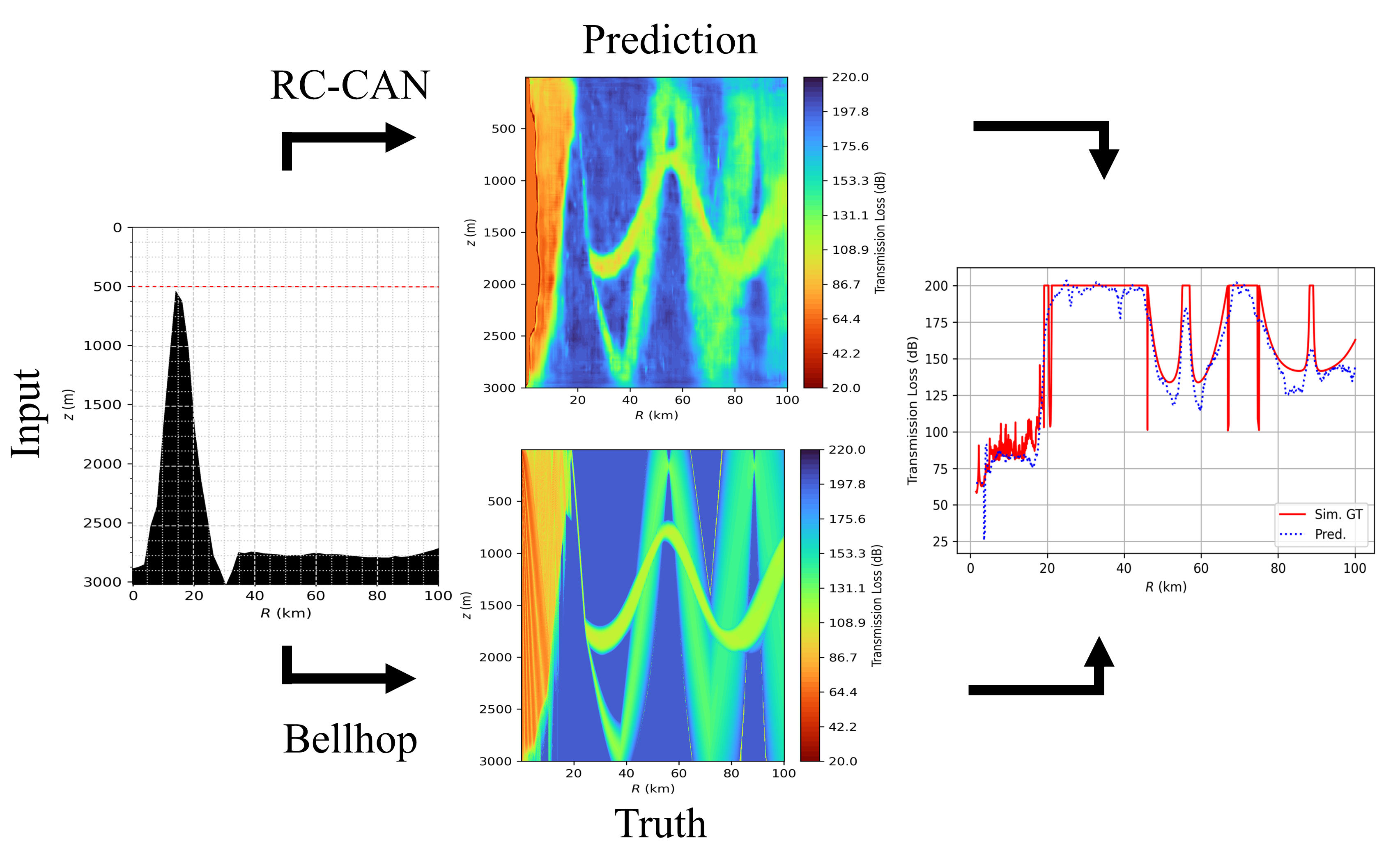
Figure 4: Transmission loss prediction for Dickins sea mount.
Comparison with Existing Models:
- Outperformed CRAN-type architectures in far-field predictions.
- Demonstrated the importance of incorporating bathymetry information into the model input.
Implications:
- Real-Time Prediction: Potential for integration into adaptive management systems for underwater noise mitigation.
- Environmental Impact: Assists in reducing the impact of underwater noise on marine mammals by providing accurate noise mapping.
Conclusions
Summary of Findings:
- The RC-CAN model effectively captures the complex relationship between ocean bathymetry and acoustic transmission loss.
- The replay-based continual learning strategy enhances the model's ability to generalize across diverse bathymetry profiles.
- The single-shot prediction approach addresses limitations of previous autoregressive models.
Future Work:
- Integration of higher-fidelity solvers or experimental data to further improve model accuracy.
- Extension of the continual learning framework to accommodate more complex and varying environmental parameters.
- Deployment in real-world scenarios for real-time underwater noise monitoring and mitigation.
Final Remarks
This project demonstrates the successful application of advanced deep learning techniques to a complex physical problem in underwater acoustics. By integrating ocean bathymetry data directly into the neural network and employing a continual learning framework, the RC-CAN model achieves high accuracy in predicting transmission loss across varying environments. The approach addresses key limitations of existing methods and offers significant potential for real-time environmental monitoring and mitigation strategies in marine operations.