Multi-Objective Optimization Framework for Ship Speed Planning to Mitigate Underwater Radiated Noise
Project Snapshot
- Project Title: Multi-Objective Optimization Framework for Ship Speed Planning to Mitigate Underwater Radiated Noise
- Type: Research
- Project Report: View Article (PDF)
- Concepts:
- Multi-Objective Optimization Framework (MOOF)
- Ray tracing in Acoustic Modeling
- Underwater Radiated Noise (URN) Mitigation
- Ship Propulsion Modeling
- Duration: 2023-24
- Skills Developed:
- Optimization Algorithms: NSGA-II, TOPSIS, Nonlinear Programming (NLP), Multi-Objective Optimization
- Data Analysis: Python, pyMOO, SMAC3
- Data Processing: GEBCO bathymetry data processing
- Data Visualization: matplotlib, seaborn
Project Overview
1. Objective
To develop a multi-objective optimization framework that determines the optimal ship speed for effective underwater radiated noise (URN) mitigation without compromising fuel consumption, thereby reducing the impact on marine mammals.
2. Key Contributions
- Novel Optimization Framework: Developed a multi-objective optimization framework incorporating acoustic modeling and fuel consumption to optimize ship speed.
- Environmental Integration: Integrated realistic ocean environmental factors such as sound speed profiles and bathymetry into the modeling process.
- Case Studies: Demonstrated the framework's effectiveness through practical case studies in both shallow and deep water regions.
Introduction and Background
1. Challenges in Underwater Radiated Noise Mitigation:
- Ship underwater radiated noise poses a significant threat to marine mammals, affecting their hearing and communication.
- Operational strategies like speed reduction can mitigate URN but may conflict with fuel efficiency and voyage constraints.
- Existing approaches lack a comprehensive framework that balances URN mitigation with fuel consumption.
2. Proposed Solution:
- Develop a multi-objective optimization framework (MOOF) to optimize ship speed along a fixed route.
- Incorporate acoustic modeling, fuel consumption models, and environmental factors into the optimization process.
- Use various optimization algorithms to find the optimal trade-off between URN mitigation and fuel efficiency.
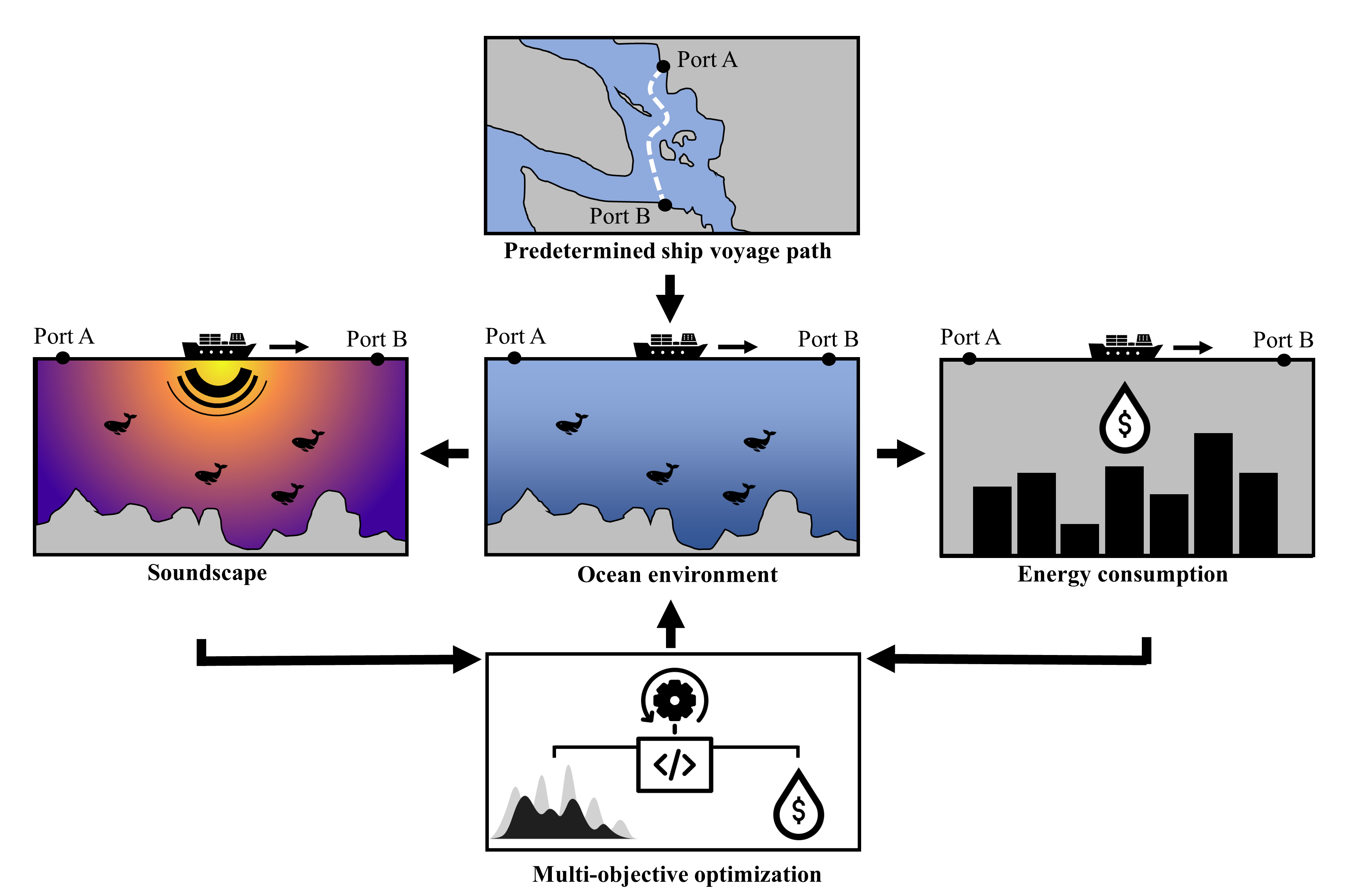
Figure 1: A high-level overview of the proposed optimization framework.
Methodology
1. Problem Statement
The framework aims to determine the optimal ship speeds for each sailing leg of a fixed route to minimize both the underwater radiated noise impact on marine mammals and the total fuel consumption, while satisfying voyage constraints such as estimated time of arrival (ETA).
The key assumptions are:
- The ship's speed is constant within each sailing leg.
- The ship's displacement remains constant throughout the voyage.
- Environmental conditions are predetermined and constant.
- Marine mammals are randomly scattered and fixed along the route.
- URN propagation is simulated at waypoints, assuming constant noise levels along each sailing leg.
2. Multi-Objective Optimization Framework
The optimization framework involves several components:
- Route Discretization: The route is divided into equidistant sailing legs connected by waypoints.
- Acoustic Modeling: Near-field URN is estimated using empirical models, and far-field noise propagation is simulated using ray-tracing methods.
- Fuel Consumption Modeling: Fuel consumption for each sailing leg is calculated using empirical models based on ship speed and characteristics.
- Objective Functions: Two objectives are defined:
- Total noise intensity levels impacting marine mammals.
- Total fuel consumption over the voyage.
- Constraints: Include speed limits, engine load restrictions, and ETA requirements.
- Optimization Algorithm: Non-dominated Sorting Genetic Algorithm II (NSGA-II) is used to find Pareto-optimal solutions.
- Parameter Tuning: SMAC3 is used for hyperparameter tuning of the optimization algorithm.
- Decision-Making: Technique for Order of Preference by Similarity to Ideal Solution (TOPSIS) is employed to select the trade-off solution from the Pareto front.
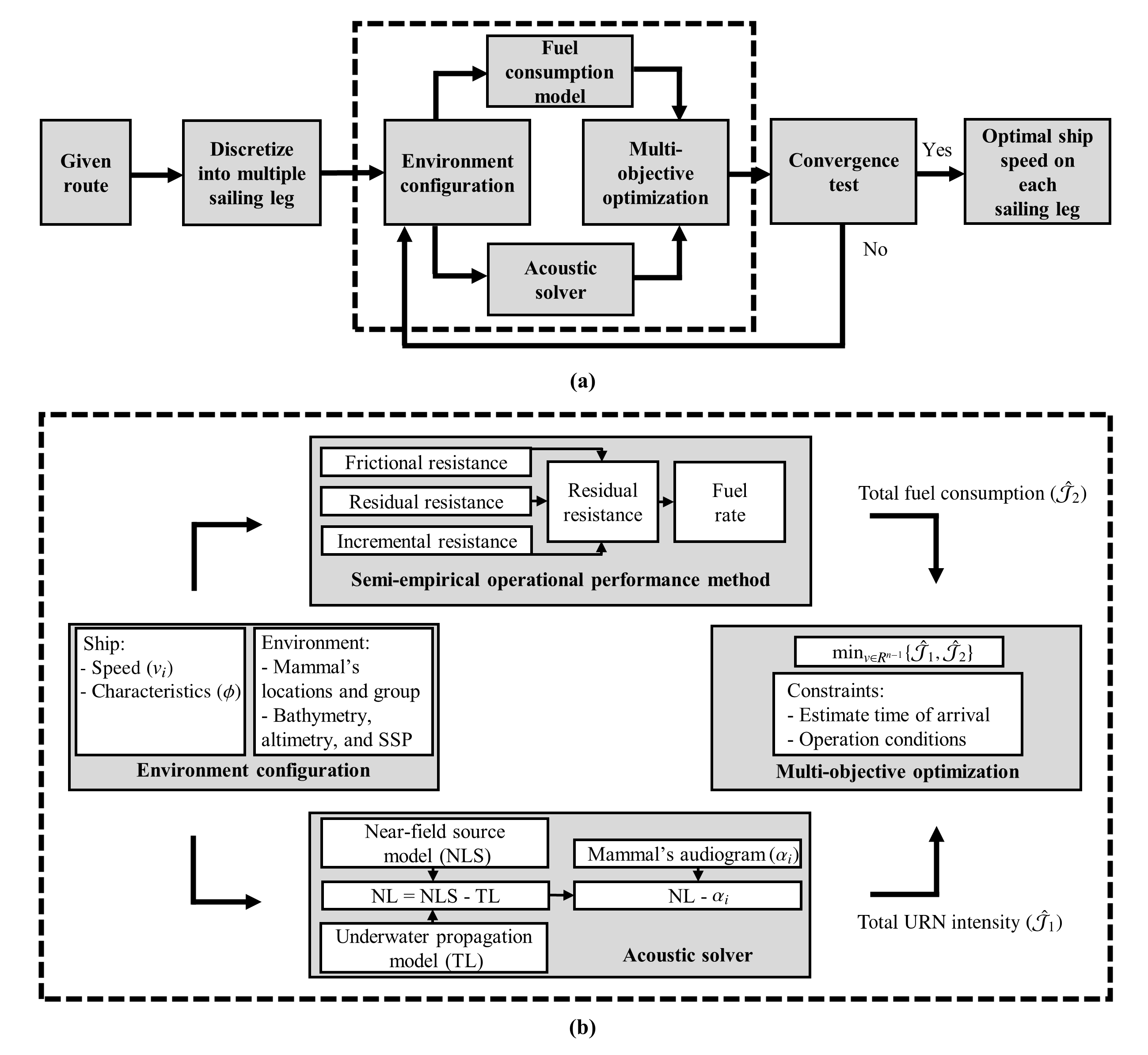
Figure 2: Multi-objective optimization framework: (a) Main pipeline; (b) Modeling pipeline.
3. Acoustic Modeling
- Near-Field Noise Estimation: Ross's empirical models are used to estimate the source noise levels based on ship speed and displacement.
- Far-Field Noise Propagation: Gaussian beam methods and ray-tracing approaches are employed to calculate transmission loss (TL) to the receivers (marine mammals).
- Marine Mammal Distribution: Marine mammals from different audiogram groups are randomly scattered along the route.
- Environmental Data: Realistic bathymetry data from GEBCO and sound speed profiles are incorporated.
4. Fuel Consumption Modeling
- Empirical Models: Lap–Keller graphs and other empirical methods are used to calculate the ship's fuel consumption rate based on speed and ship characteristics.
- Factors Considered: Frictional resistance, residual resistance, and hull form are considered in the calculations.
5. Optimization Algorithm
- NSGA-II: The Non-dominated Sorting Genetic Algorithm II is used to solve the multi-objective optimization problem, generating a Pareto front of optimal solutions.
- Parameter Tuning: SMAC3 is used to optimize NSGA-II parameters such as population size, number of generations, crossover probability, and mutation probability, using Bayesian optimization.
- Decision-Making with TOPSIS: The Technique for Order of Preference by Similarity to Ideal Solution is used to rank the Pareto-optimal solutions and select the trade-off solution that balances URN mitigation and fuel consumption.
Case Studies
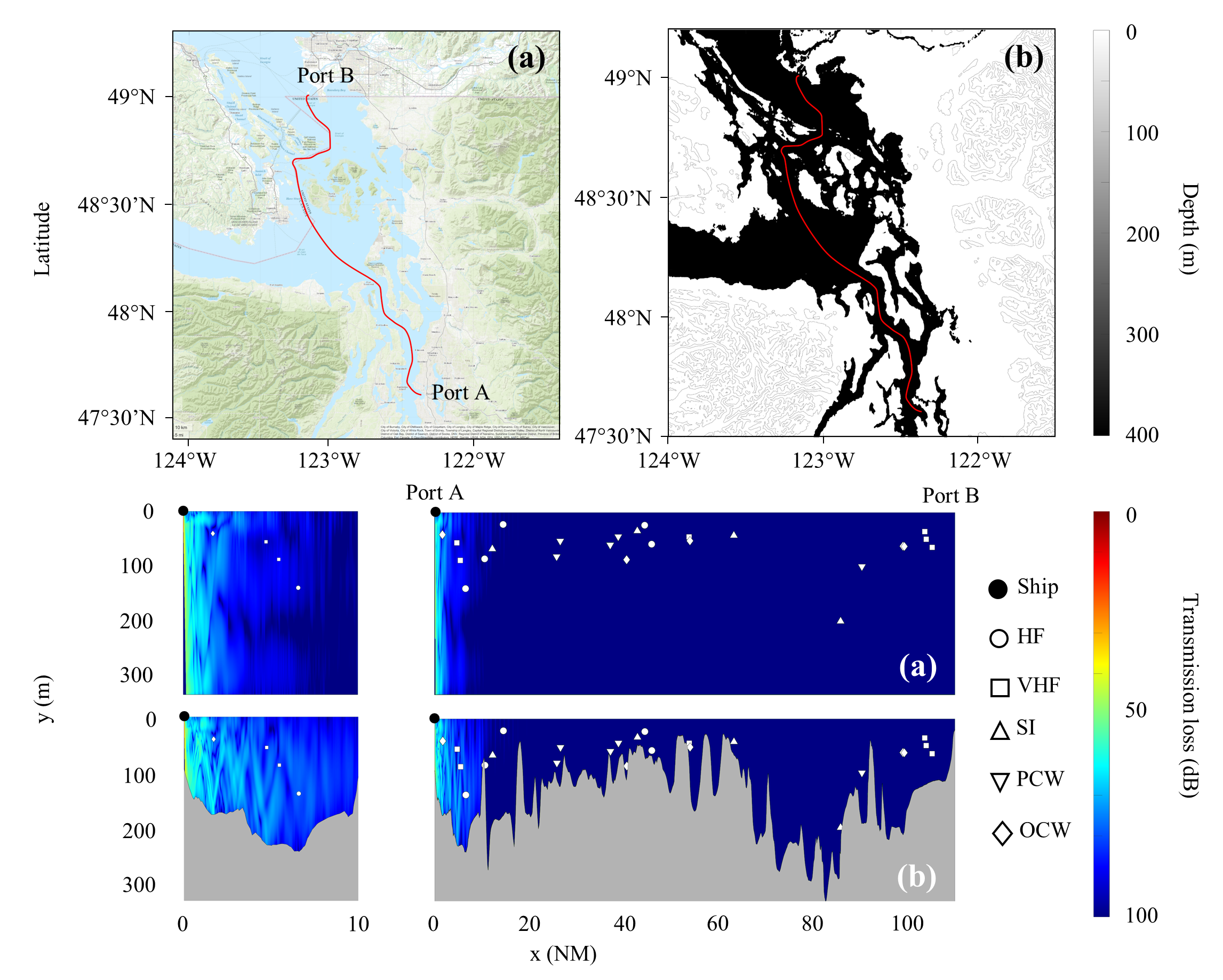
Figure 3: Configuration of a case study: (a) Ship route on the geographic plot; (b) Bathymetry contour; (c) Transmission loss contour.
The framework is demonstrated through practical case studies involving a 6900 TEU containership in both shallow and deep water regions.
1. Case A: Shallow Water Region
- Route: From the Port of Seattle, USA, to Roberts Bank Port, Canada, spanning 110.09 NM in the Salish Sea.
- Environment: Shallow region with maximum depth of approximately 331.2 m and average depth of 158.1 m.
- Marine Mammals: 25 randomly scattered marine mammals from five distinct hearing groups.
- Data: Bathymetry data extracted from GEBCO at a resolution of 0.31 NM.
2. Case B: Deep Water Region
- Route: From Port of Vigo, Spain, to Port of Cork, Ireland, covering 641.68 NM in the Celtic Sea.
- Environment: Deep water with maximum depth around 5042.5 m and average depth of 503.1 m.
- Marine Mammals: Same configuration as Case A.
- Data: Bathymetry data and environmental conditions similar to Case A.
Results and Analysis
Optimization Outcomes:
- Pareto Fronts: Obtained Pareto-optimal solutions illustrating the trade-offs between URN mitigation and fuel consumption.
- Trade-Off Solutions: Selected trade-off speed profiles using TOPSIS, balancing the two objectives effectively.
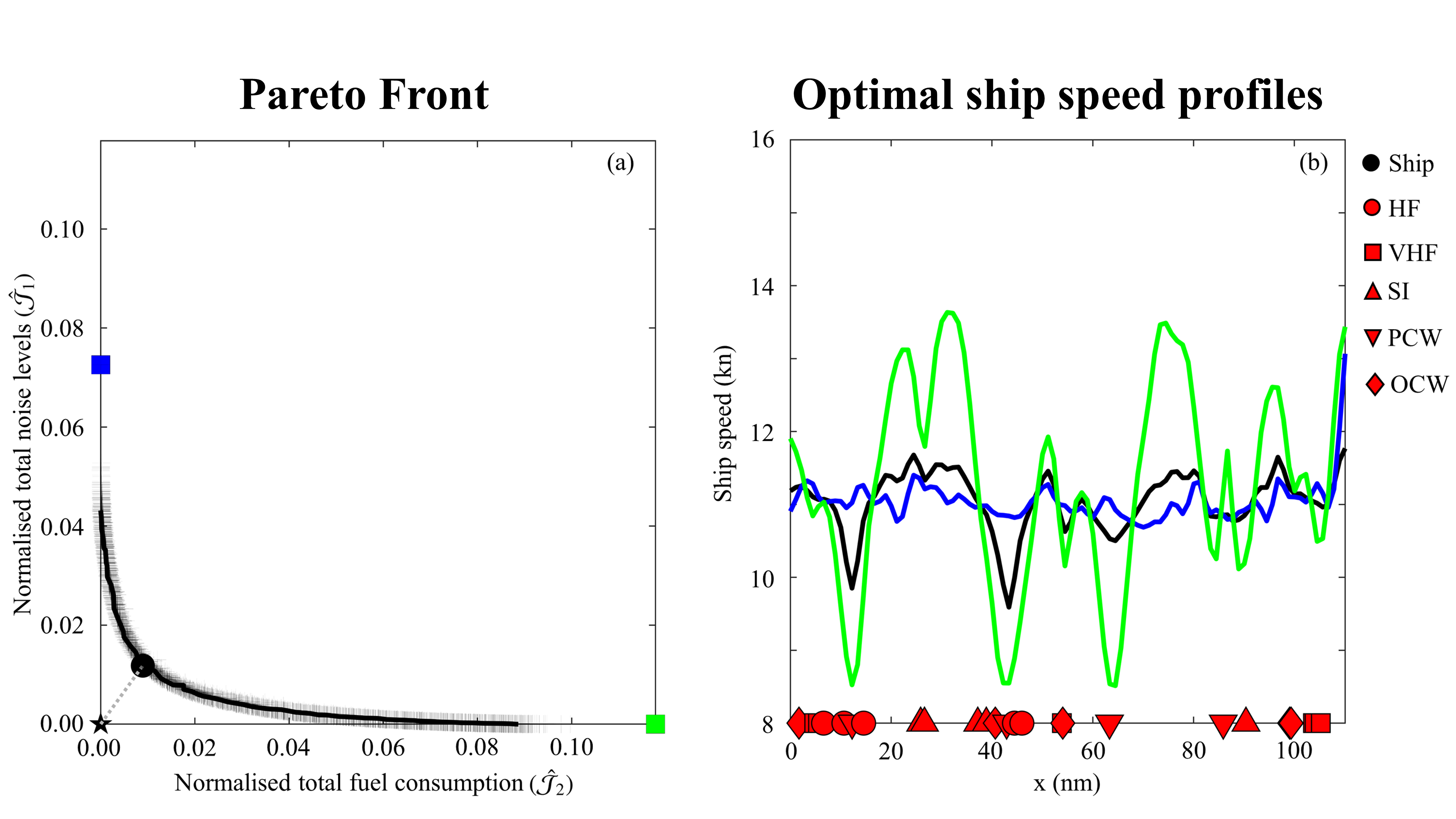
Figure 4: NSGA-II results: Pareto front and optimized ship speed profiles.
1. Case A Results
- URN Reduction: Achieved a reduction of 1.31 dB in total URN intensity (95% lower compared to the fuel-dominant solution).
- Fuel Consumption: Increased by 4.33 MT (0.6% higher than the fuel-dominant solution).
- Speed Profiles: The optimized speed profile showed slowdowns near sensitive marine mammal locations.
2. Case B Results
- URN Reduction: Achieved a reduction of 0.95 dB in total URN intensity (88.9% lower compared to the fuel-dominant solution).
- Fuel Consumption: Increased by 91.52 MT (0.8% higher compared to the fuel-dominant solution).
- Environmental Adaptability: The framework effectively adapted to the deep-water environment, optimizing speed without unnecessary slowdowns.
Implications:
- The framework enables significant URN mitigation with minimal impact on fuel consumption.
- Optimized speed profiles are environmentally adaptive, prioritizing slowdowns near sensitive marine mammal groups.
- The approach is versatile and applicable to different oceanic environments.
Conclusions
Summary of Findings:
- A multi-objective optimization framework was successfully developed to balance URN mitigation and fuel consumption.
- The framework effectively incorporates environmental data, acoustic modeling, and optimization algorithms.
- Practical case studies demonstrate the framework's applicability and effectiveness in real-world scenarios.
Future Work:
- Extend the framework to consider dynamic environmental conditions and real-time data.
- Incorporate higher-fidelity acoustic models and experimental data for improved accuracy.
- Integrate the framework into operational decision-making systems for shipping industries.
Final Remarks
This project presents a comprehensive framework that addresses the challenge of mitigating underwater radiated noise from ships while considering fuel efficiency. By optimizing ship speeds along a fixed route, the framework achieves significant reductions in URN impact on marine mammals with minimal increases in fuel consumption. The adaptability of the framework to different environmental conditions and its incorporation of optimization techniques highlight its potential as a valuable tool for sustainable maritime operations.